Nautobot Workshop Blog Series - Overview
Nautobot Workshop Blog Series
Nautobot Workshop is a hands-on blog series for building a fully automated network lab using Nautobot, Containerlab, and Docker. Starting with a basic Ubuntu setup, each post walks through:
- Deploying Nautobot via
nautobot-docker-compose - Modeling topologies with Containerlab and vrnetlab routers
- Populating Nautobot with real device data using Ansible
- Generating configurations with Jinja2 templates
- Enforcing compliance with the Golden Config plugin
- Leveraging Nautobot’s GraphQL API for dynamic inventory
This series is perfect for network engineers aiming to combine source of truth, automation, and simulation in a streamlined workflow.
🚀 All project files are available in this GitHub repo
Workshop Outline
Part 1: Environment Setup - Release date 6/5
Goal: Build a repeatable automation lab foundation using Ubuntu, Containerlab, Nautobot, and vrnetlab.
- Install and prepare Ubuntu 24.04 LTS
Install dependencies:
- Docker
- Containerlab
- vrnetlab (for IOL)
- nautobot-docker-compose
- Clone and configure:
- containerlab-topology
- nautobot-docker-compose
- Validate working environment:
- Spin up Nautobot stack
- Verify IOL devices launch via containerlab
Part 2: Review the Network Topology - Release date 6/12
Goal: Understand the multi-site MPLS lab you’ll be modeling in Nautobot.
- Overview of uploaded diagrams:
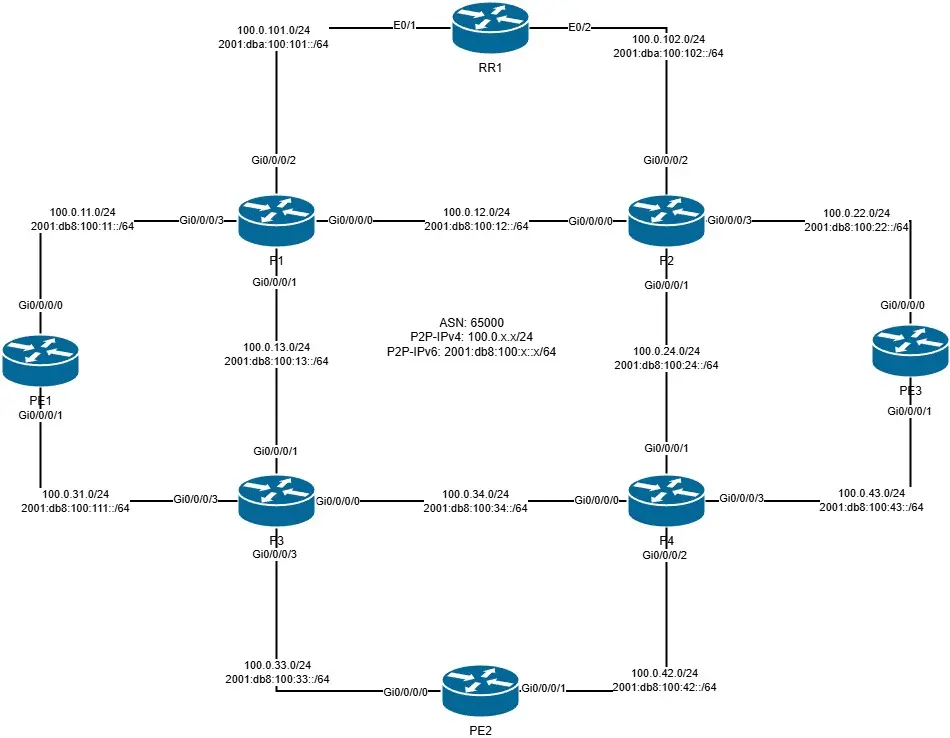
- Provider topology
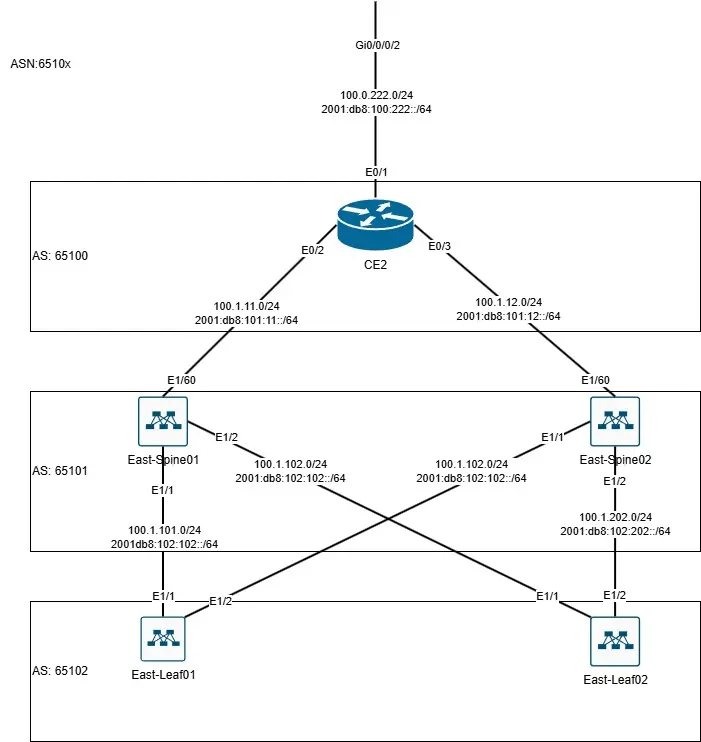
- East Data Center
- West Data Center

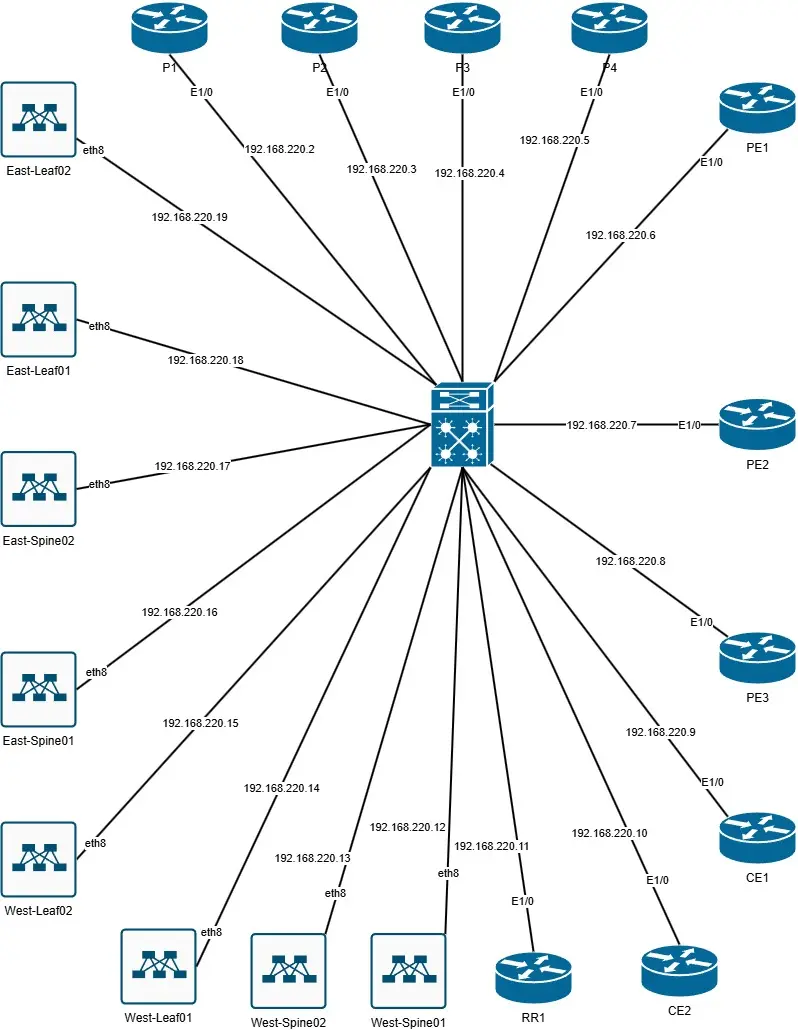
- In-band Management
- Provider topology
- Discuss ASN layout, IP schemes (v4/v6), and router roles (RR, PE, P, CE)
- Management overlay discussion and how it ties into automation
Part 3: Adding Devices to Nautobot via Ansible - Release date 6/19
Goal: Automate network inventory onboarding.
- Use networktocode.nautobot Ansible collections
- Build YAML or Jinja templates for devices, interfaces, and IPs
- Write a playbook to:
- Create Sites, Devices, Interfaces, IP Addresses, Connections
- Validate in Nautobot UI
Part 4: Building ContainerLab topology from the Nautobot Inventory - Release date 6/26
Goal: Create a virtual topology based on the Nautobot inventory that can be used for testing and validation.
- Write GraphQL queries for device + interface inventory
- Write a Jinja2 template to create the CLAB topology YAML
- Write a Jinja2 template to create an initial configuration with MGMT reachability
Part 5 - Nautobot Golden Configuration - Configuration Backups - Release date 7/03
Goal: Enable automated configuration backups from network devices to a Git repository using the Nautobot Golden Configuration app.
- Configure GitHub secret in Nautobot Secrets
- Create a Secrets Group for GitHub token access
- Add and sync a Git repository to store backups
- Prepare Git repo with jobs/ and backup-configs/ folders
- Create a GraphQL query for SOT Aggregation
- Update Golden Config Settings to:
- Define backup paths
- Associate SOT Aggregation Query
- Enable required Golden Config Jobs
- Execute Backup Configurations Job for EOS and IOS devices
- Confirm backups stored in Git under backup-configs/
Part 6 - Nautobot Golden Configuration - Intended Configurations - Release date 7/10
Goal: Validate that device configurations match the intended state generated from Nautobot source-of-truth data.
- Define what configuration compliance means in Nautobot
- Set up a Git repo for intended configuration templates
- Create modular Jinja2 templates by platform and role (e.g., IOS, EOS)
- Update Golden Config Settings to point to intended config templates
- Extend the container environment to support custom Jinja filters
- Generate and validate intended configurations
- Run the compliance job and view compliance status in the Nautobot UI
Part 7 - Nautobot Ansible Dynamic Inventory - Release date 7/017
Goal: Use Nautobot as a dynamic inventory source in Ansible to generate and deploy real device configurations.
- Configure Ansible to use Nautobot’s GraphQL API for dynamic inventory
- Secure API access with environment variables and Ansible Vault
- Build an Ansible role to query device data from Nautobot
- Use Jinja2 templates to generate platform-specific configurations
- Push configurations to Cisco devices using cisco.ios.ios_config
- Demonstrate how source-of-truth data drives real configuration deployment
Part 8 - Nautobot Config Context and Custom Fields - - Release date 7/24
Goal: Leverage Nautobot’s Config Context and Custom Fields to drive dynamic, structured configuration generation from a Git-backed source of truth.
- Define and store structured Config Context data in Git for centralized version control
- Create Config Context Schemas to validate and organize data for:
- VRF definitions
- User account configurations
- Global protocol settings (OSPF, MPLS, BGP)
- Cisco HTTP server settings (e.g.,
ip http server) - SSH access configurations
- Line VTY parameters
- Assign Config Contexts to devices based on role, location, or other criteria
- Enable context weighting to ensure fallback/default configurations
- Create interface-level Custom Fields to track OSPF-specific metadata:
- Interface type (point-to-point, point-to-multipoint)
- Area assignment
- Use this structured data in Jinja2 templates to generate context-aware, platform-specific configurations